Overview
Strategic planning is becoming increasingly important as a means to help state and metropolitan area governments select policies and actions to address pressing issues that are fraught with uncertainty. More specifically, Federal direction has challenged state, regional, and local transportation agencies with measuring the outcomes of decisions through performance-based planning, including considering how transportation solutions may impact future goals such as sustainability, health, and mobility. Further complicating matters, plans need to be resilient to changing transportation and land use trends and the implications of emerging technologies and constraints. VisionEval is an open source common framework building on the successful GreenSTEP family of strategic planning tools that is intended to address these needs.
VisionEval merges this family of tools into an open-source project with a supporting community forum of partner agencies and others sharing in its use and enhancement. The goal is to support a broad array of potential tool uses and enable pooled enhancements expanding the types of outcomes measured or refine the specificity of transportation and land use solutions considered. The work to date draws from successful past and interested future users nationally, who will both define the policy needs and uses of these tools, and set their direction moving forward.
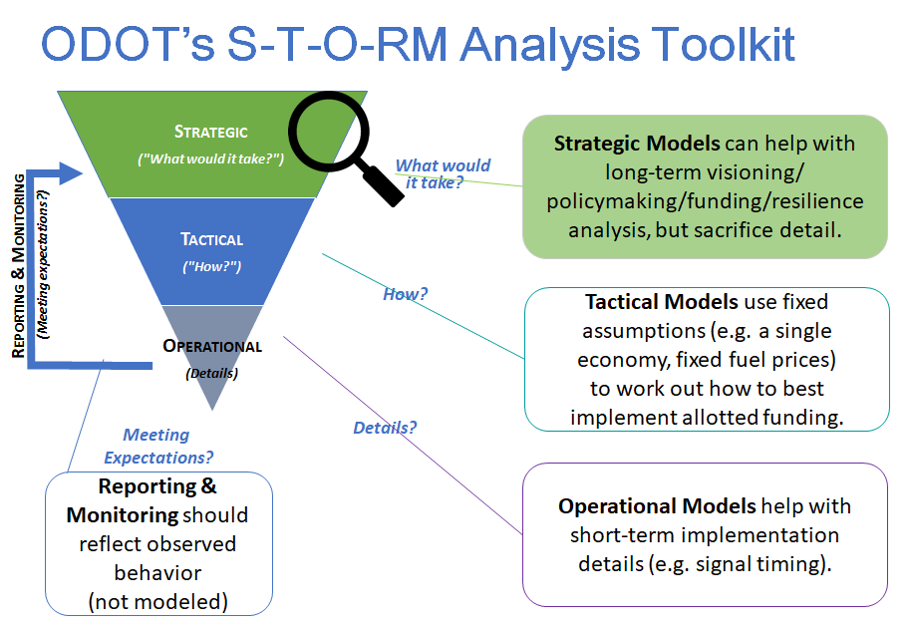
Strategic planning is used in Oregon DOT, for example, as a foundational step before undertaking tactical or operational modeling, as demonstrated below:
History of VisionEval Open Source Project Development
In Phase 1 of the VisionEval project, the founding FHWA-Oregon DOT partners successfully completed a proof-of-concept software framework capable of implementing the existing strategic planning models into the open-source VisionEval project. In Phase 2, FHWA, AASHTO, and ODOT are partnering to first transfer the Regional Strategic Planning Model (RSPM) and the scenario viewer into the VisionEval framework. The Rapid Policy Assessment Tool (RPAT), and the statewide GreenSTEP models will follow. The resulting models provide the base for the Phase 3 pooled fund project to develop additional packages that can be easily transferred among these implemented models. VisionEval and all model enhancements are freely available, flexible, and easy for users and contributors to understand, assemble, and extend in a plug-and-play fashion.
VisionEval is currently operated by the Collaborative Development of New Strategic Planning Models Pooled Fund, hosted by FHWA. The pooled fund supports VisionEval outreach, development, technical maintenance, and tool upgrades. Partners both define the policy needs and uses of these tools, and set the direction for future tool development. VisionEval also provides forums for agencies to share best practices in applying strategic planning tools. In addition, agencies can share their experiences customizing the applications for local conditions in support of long range policy conversations.
The VisionEval framework is built on the following “GreenSTEP family” of models:
The GreenSTEP model was the first model in the strategic planning family, developed by the Oregon Department of Transportation (ODOT). ODOT developed the model to assist in the development of plans to reduce greenhouse gas (GHG) emissions from light-duty vehicles, to meet Oregon State statutory goals. GreenSTEP models the effects of many different factors (e.g. transportation supply, prices, land use, etc.) on household vehicle ownership and use, and the effects on emissions, traffic congestion, and other responses.
The RSPM (Regional Strategic Planning Model) was developed by ODOT as an offshoot of the GreenSTEP model to support the preparation of metropolitan area scenario plans. The name reflects a broadening of the policies, beyond state statutory requirements.
The RPAT (Rapid Policy Analysis Tool) was developed under the federal Strategic Highway Research Program (SHRP2). The model was developed to help planners evaluate the potential effect of growth policies on regional travel. Portions of the GreenSTEP model were used in RPAT, but substantial revisions were made to the code, including use of land use place type categories.